FTC Team #30410, my rookie team for the 2025–2026 DECODE season.

Team Axiomatic is my FIRST Tech Challenge team. It's my rookie season. I do most of the technical work (CAD, fabrication, electronics, software, autonomous), with help from my little sister on assembly and parts, and a lot of advice from the FTC Discord and a few neighboring league teams.
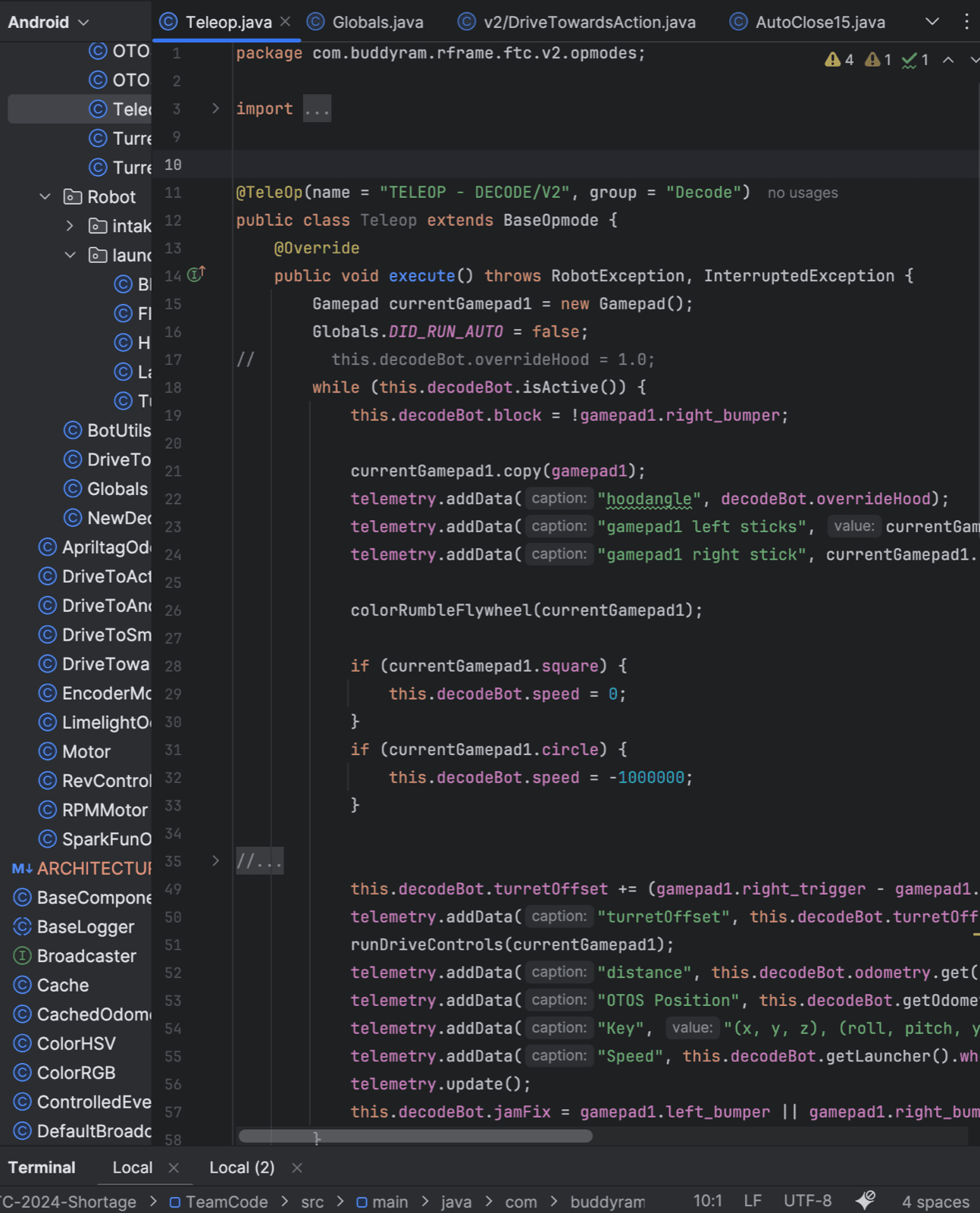
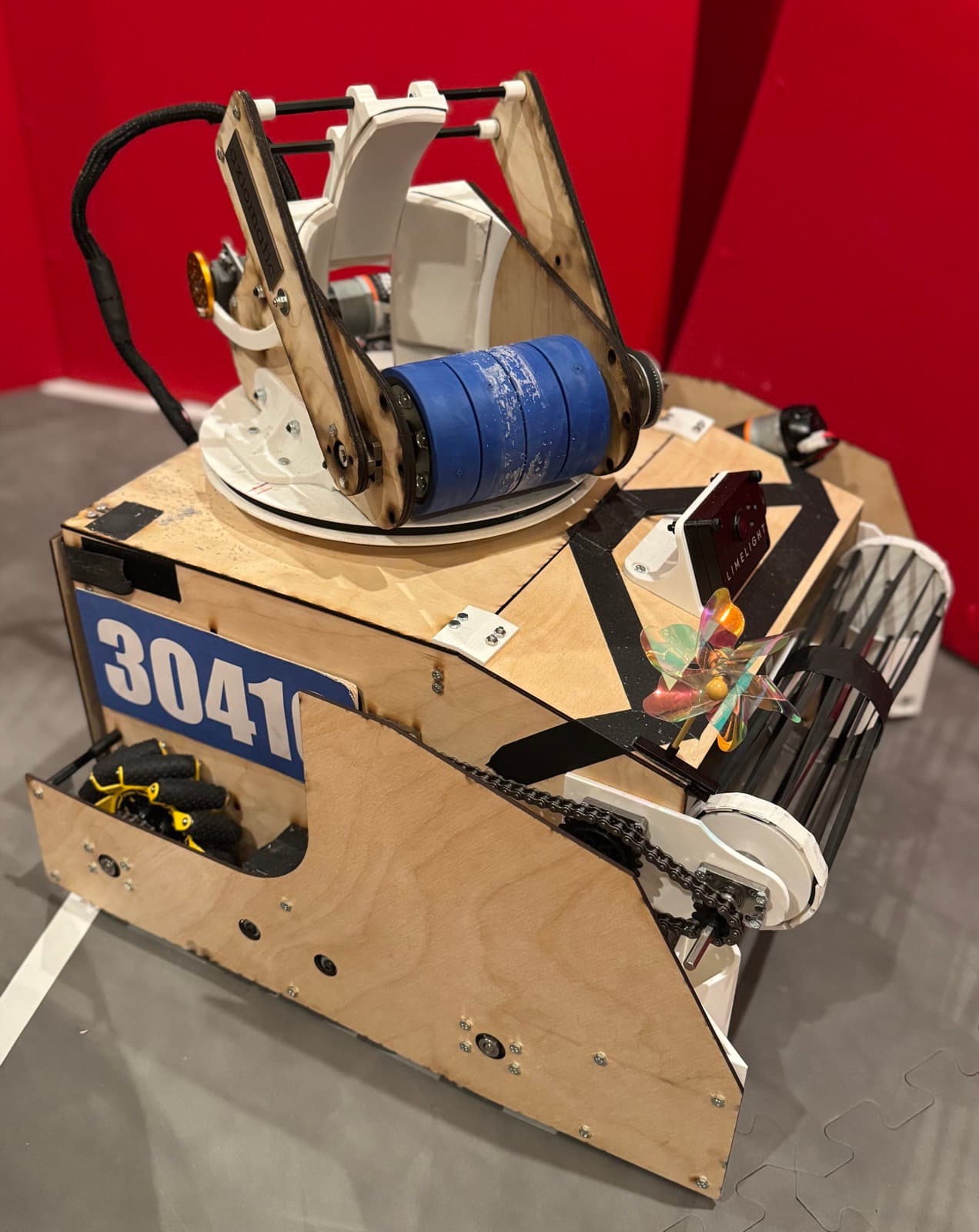
The robot uses a hooded shooter with a 5 lb, 6000 RPM flywheel and a belt-driven turret that aims dynamically based on where the robot is on the field. The software runs on top of RFrame, a small Java framework I wrote on top of the FTC SDK and put up on GitHub so other teams can use it.
I didn't make it past the Inter-League Tournament this year, but I did pick up the 1st place Control Award, which I'm grateful for. I've also been documenting the build on my YouTube channel. It's been a fun way to share what I'm learning with other teams.
Designing and building from home
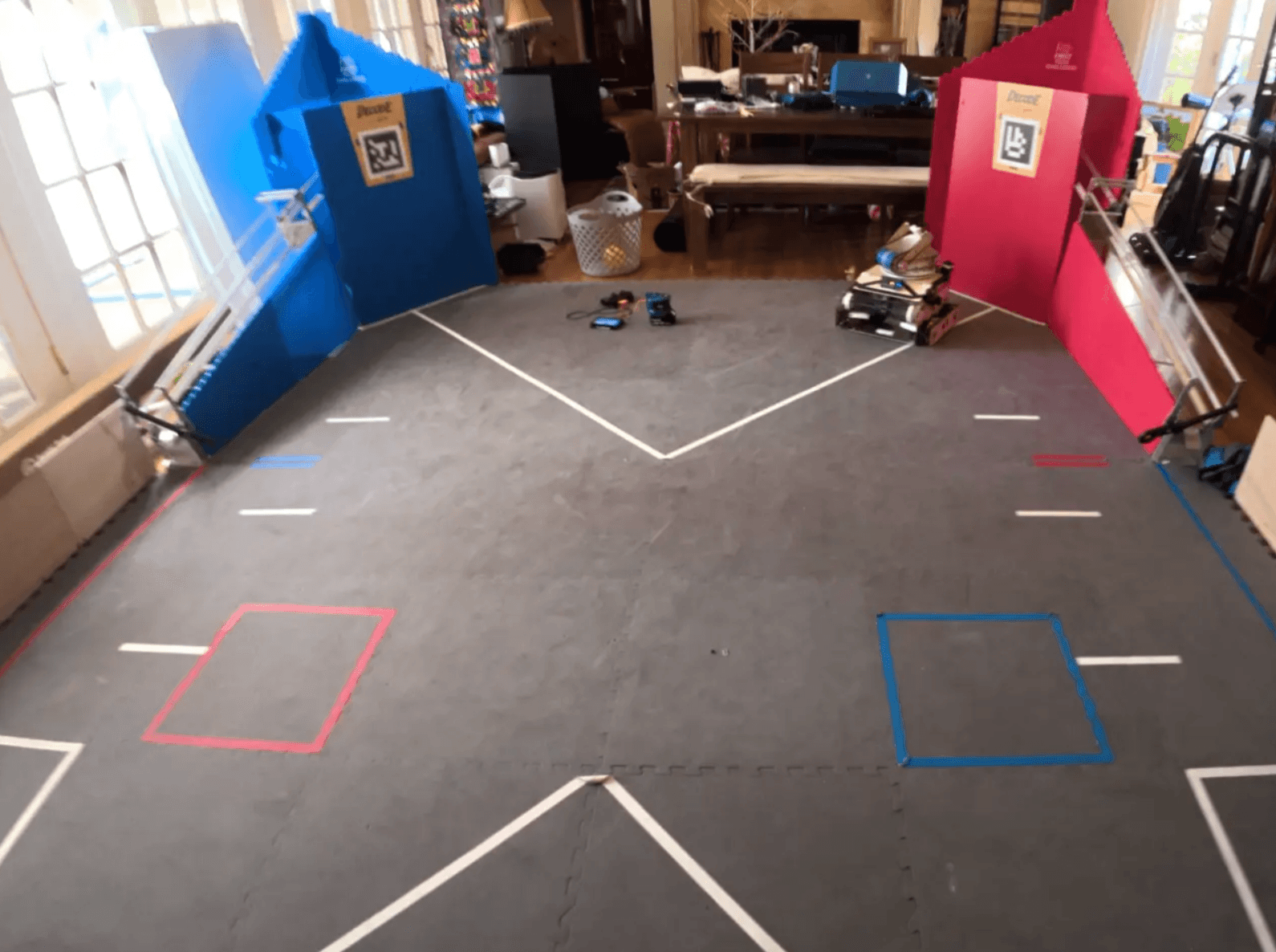
Without access to a school shop, the garage became the machine shop and the living room became a full-size DECODE field. CAD in Fusion 360, parts laser-cut and 3D-printed at home, the rest borrowed, sponsored, or bought secondhand from a team that was closing down.
RFrame: a small open-source robot framework
RFrame is a Java framework I wrote on top of the FTC SDK. It handles hardware initialization, background threading, odometry, and subsystem coordination so each season's game-specific logic stays clean and modular. It's on GitHub for any FTC team that wants to use it.
Dynamic aiming and autonomous
Localization combines an OTOS optical sensor with a Limelight vision system for AprilTag corrections. A from-scratch pathing system feeds the turret and flywheel real-time targets, so the robot can aim and shoot while moving between scoring positions.
Documenting it on YouTube
I've been posting build updates, technical breakdowns, and meet recaps on the @axiomatic-robotics channel. It's been a nice way to give back to the FTC community that's helped me figure things out, and to keep an honest record of what worked and what didn't.