Classical Euclidean geometry, contest problems, physics, and the small bits of math that hide inside everyday systems.

Math is the thread that runs through most of what I make. I like the problems that look small and turn out to have a lot of structure underneath: a clean Euclidean construction, an inequality that resolves with the right substitution, the moment a messy system collapses into a single relation.
Day-to-day I'm working through contest geometry problems and pushing into physics, mostly the mechanics side where the math actually has something physical to point at. Outside of that I read whatever I can find about classical geometry, projective tricks, and the surprisingly deep ways simple shapes interact.
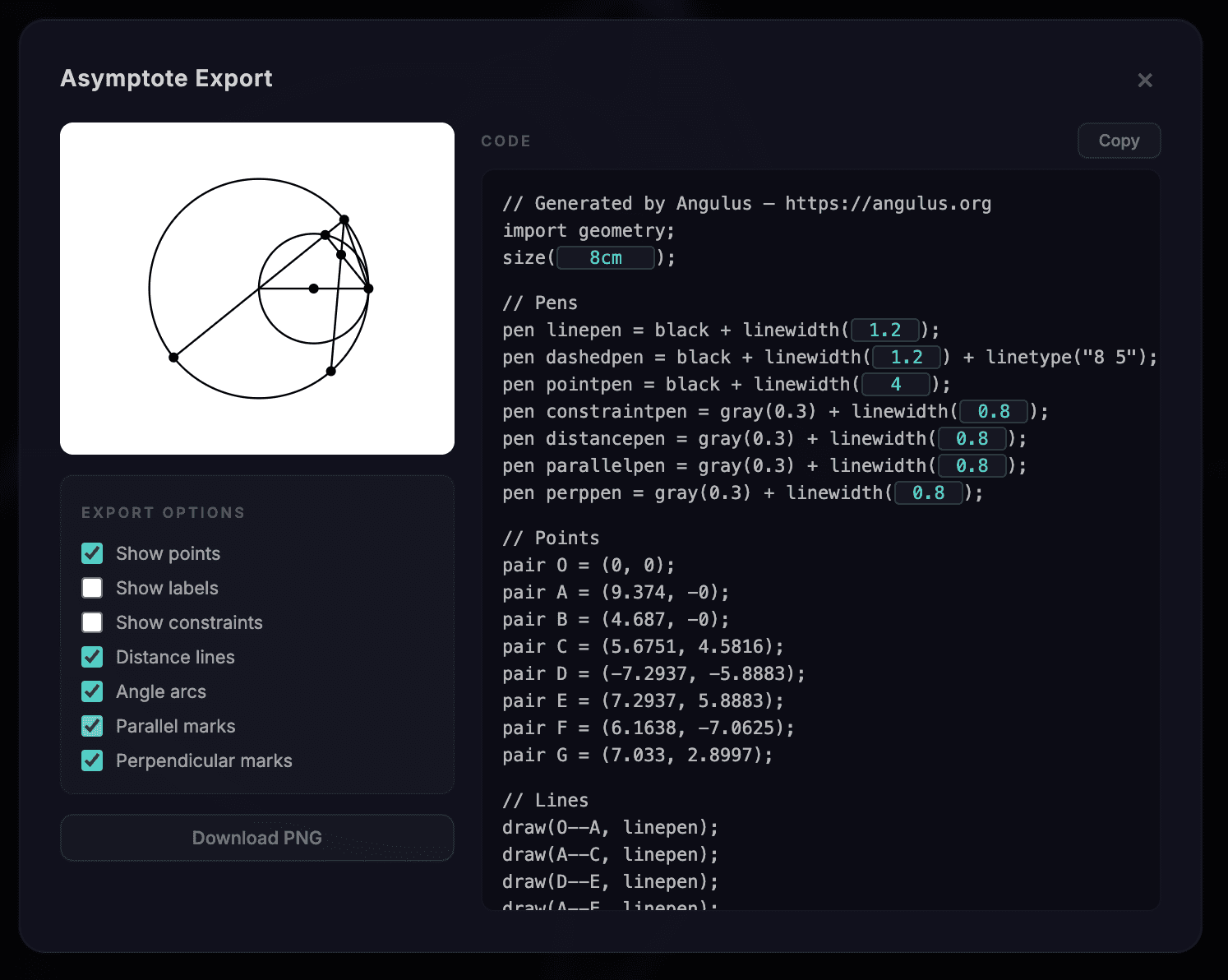
Constraint geometry: Angulus
One reason I built Angulus is that constraint-solving drawing tools aren't common in everyday diagram-making. You drop in points, lines, and circles, declare the constraints, and the solver finds the configuration. Mostly built so I'd stop redrawing the same Euclidean diagrams on paper.
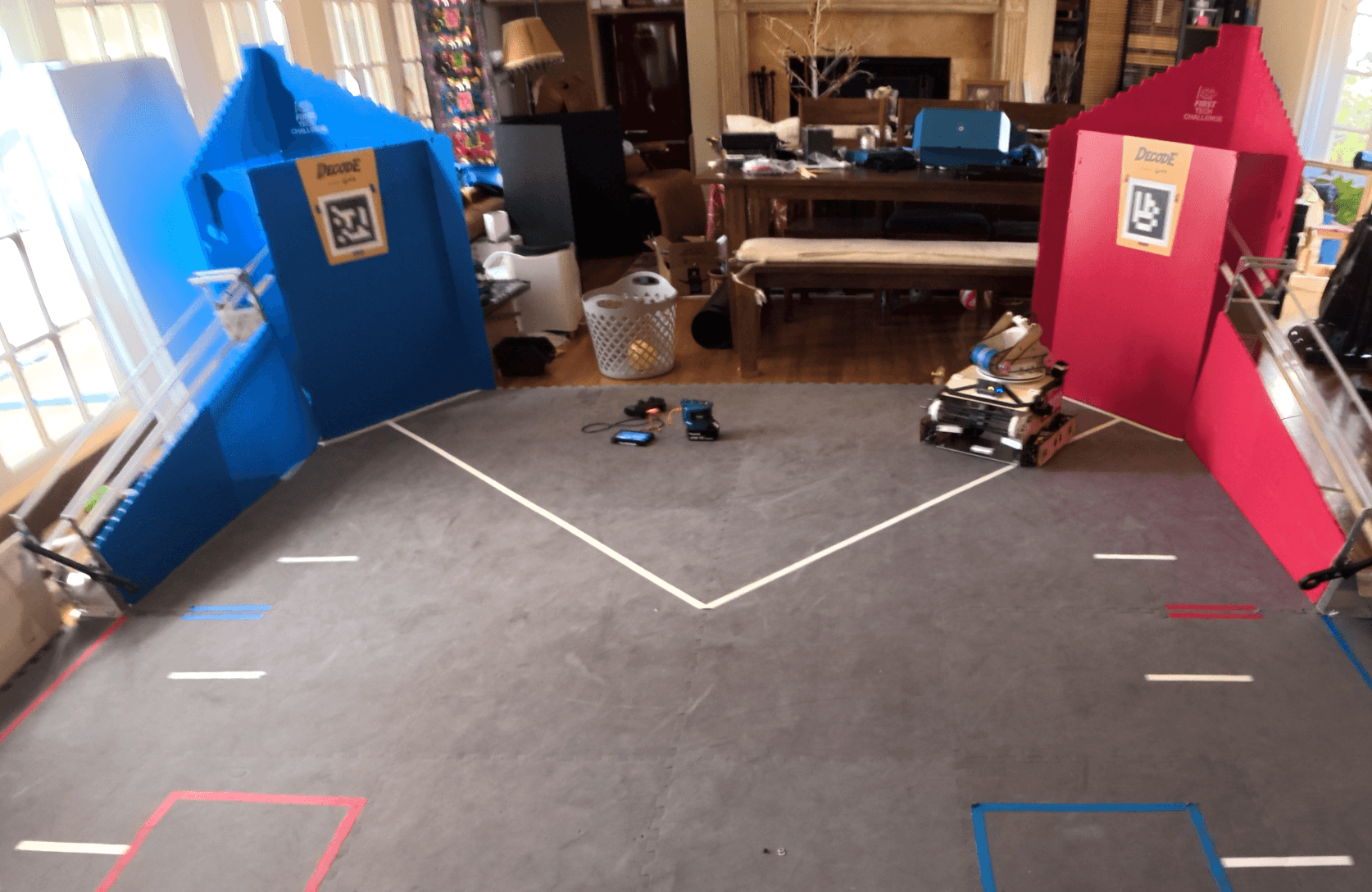
Aiming on the robot
Math also shows up on my Team Axiomatic FTC robot. Automatic aiming uses a regression fit over real shooter measurements that maps distance to optimal flywheel RPM, so the robot reads its position from the field tags, plugs it into the model, and the shooter spins up to the right speed.

Drawing with math: Desmos
Desmos, the online graphing calculator, turned into my favorite sketchpad. Implicit regions, animated sliders, and a list comprehension language that lets you draw with equations directly. Most of what I make there is geometric patterns, animated illustrations, or tiny self-contained toys.